Research
Robotic Exoskeleton for Postural Control Training of Spinal Cord Injury Patients
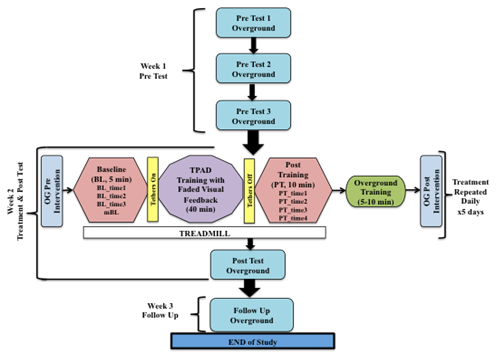
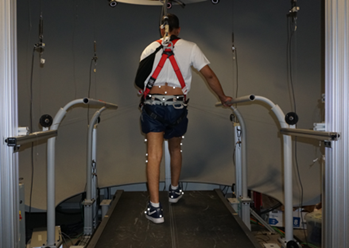
The Robotic Stand Trainer (RObUST) is a cable-driven robotic exoskeleton for postural control training of spinal cord injury (SCI) patients. It is a fourteen motor, four actuator system that can provide planar control on a subject’s trunk, 6 degree-of-freedom control on their pelvis, and pull forces on each knee that transforms postural control training of SCI patients.
RobUST transforms SCI rehabilitation
With a group of colleagues at the ROAR Lab, I designed, and built this device along with its software control system.
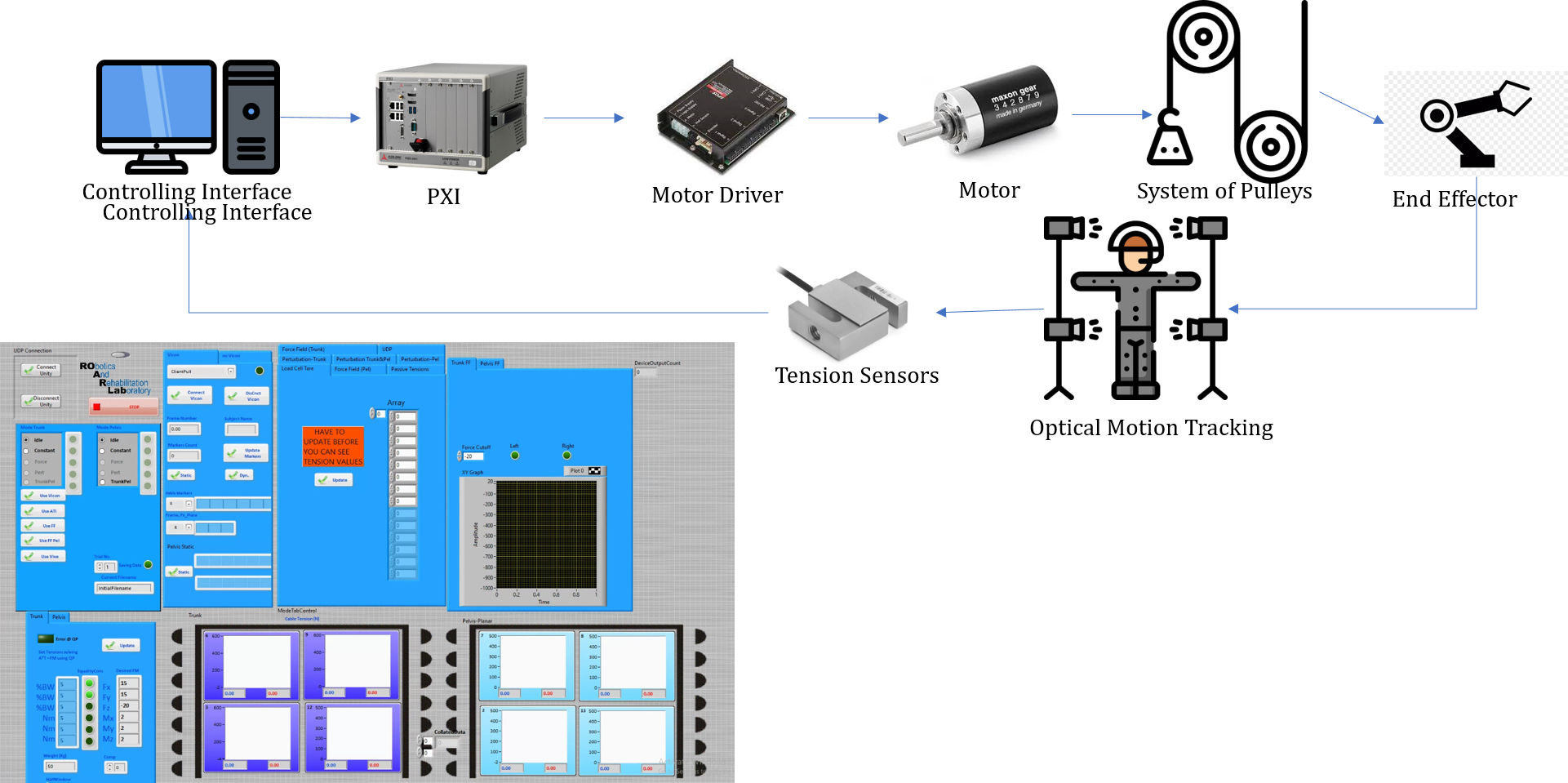
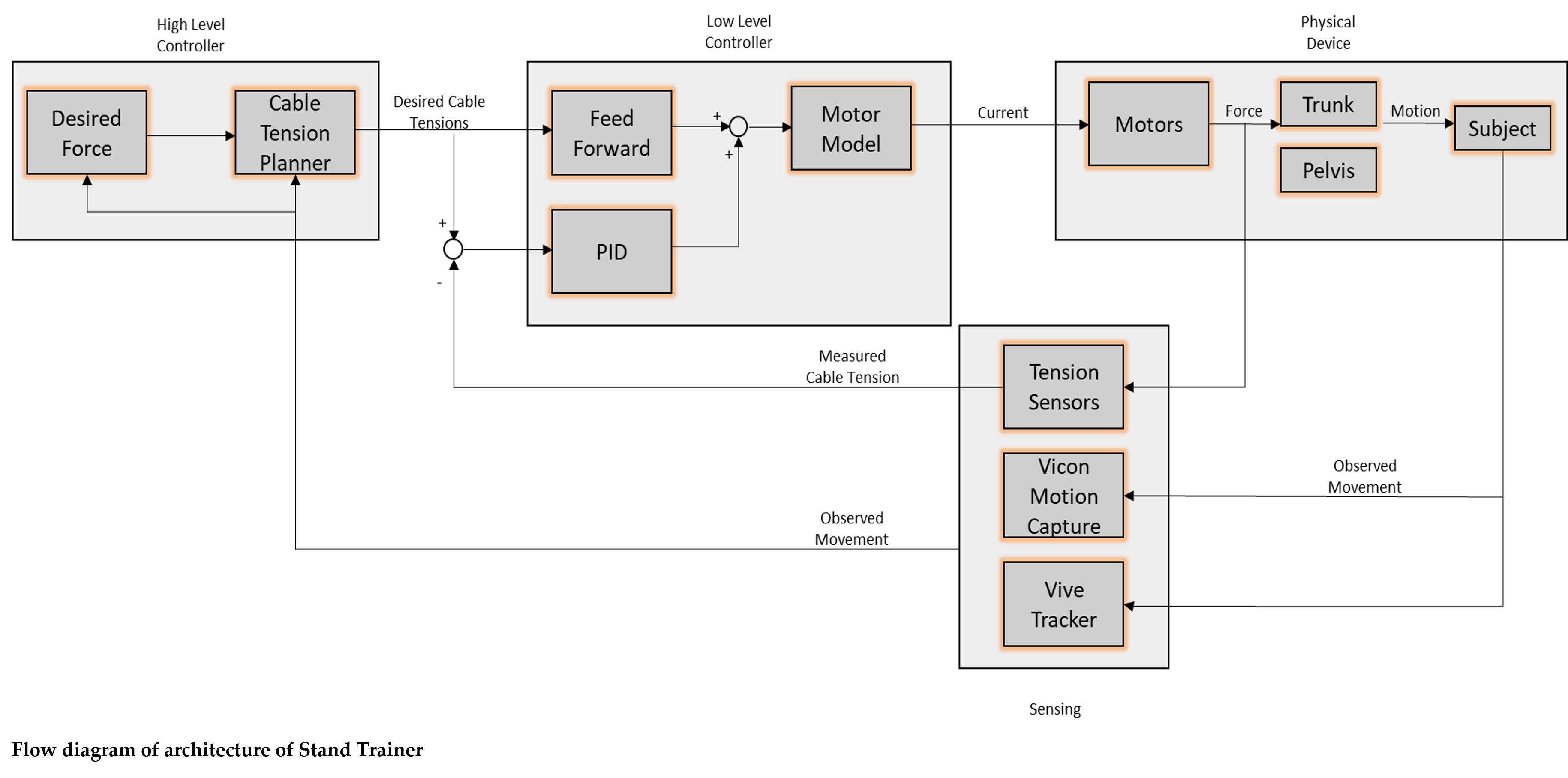
RobUST is programmed using a LabVIEW real-time controller that operates on both a host computer and a PXI (Peripheral Component Interconnect eXtensions for Instrumentation) remote controller, creating a robust dual-controller setup.
-
PXI Remote Controller: This controller handles critical real-time tasks:
- Low-Level Current Control: Precisely regulates the current supplied to the motors to ensure accurate torque and movement.
- High-Level Force Control and Cable Tension Planning: Manages overall force application and plans the tension in the cables, ensuring smooth operation and safety.
- Load Cell Sensor Integration: Incorporates data from load cells to monitor forces or weights, which is essential for maintaining system stability and performance.
-
Host Computer: Manages user interface and control functions, enabling direct user interaction and communication in addition to interfacing with the positioning system. This includes graphical user interfaces (GUIs) for real-time monitoring and command inputs.
This configuration leverages the strengths of both controllers: the PXI system handles real-time, computation-intensive control tasks, while the host computer focuses on user interaction and overall system coordination, maximizing both responsiveness and reliability.
I was a critical part of the construction team and in designing elements of the device:

Some parts that I designed and fabricated:
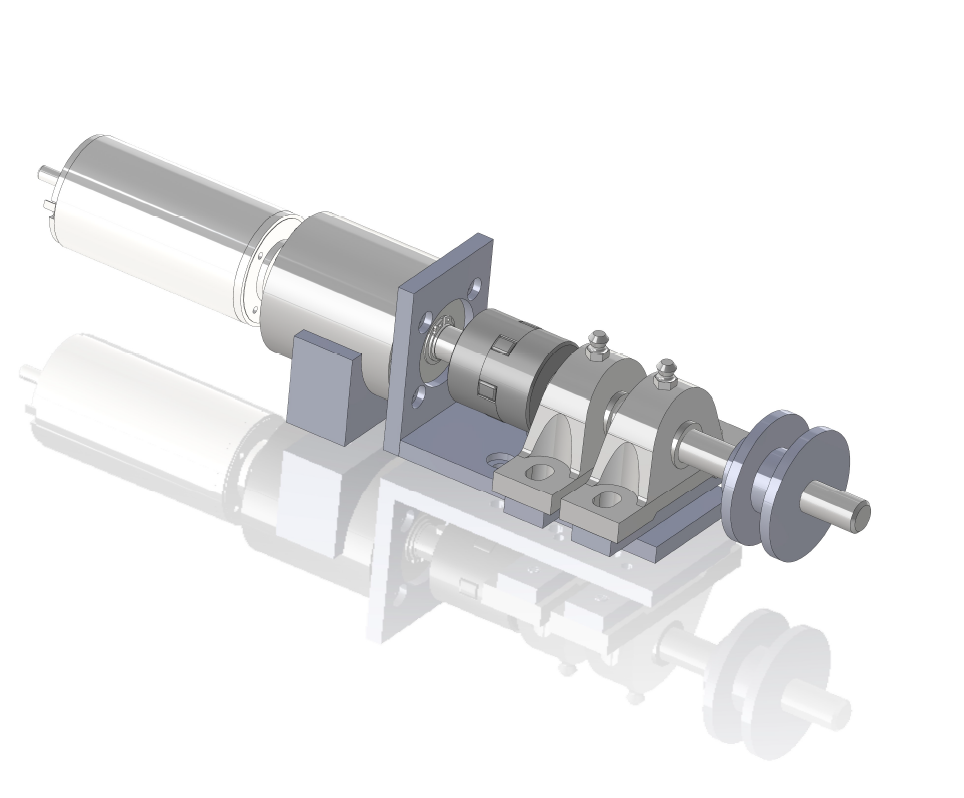
Motor Assembly

Rotating Pulley Assembly
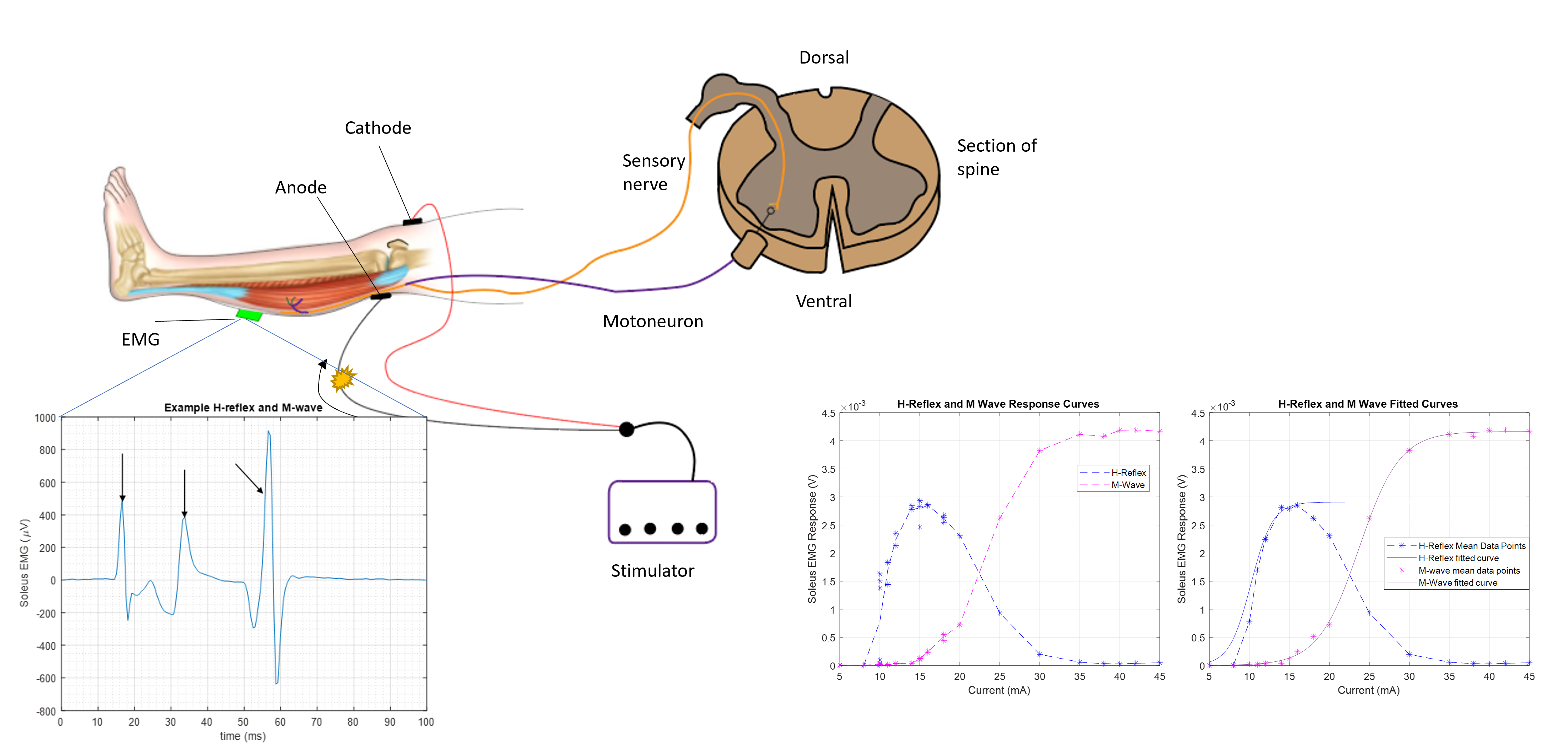
Transcutaneous Spinal Cord Stimulation
Transcutaneous spinal cord stimulation is a non-invasive analog to epidural stimulation which has the potential to activate neuronal circuitry below a spinal cord injury lesion, circuits which remain intact but can no longer efficiently receive supraspinal input. I led the investigation of the use of TSCS at the ROAR Lab, concluding in studies that showed that electrical stimulation increases muscle activation during functional tasks in healthy subjects.
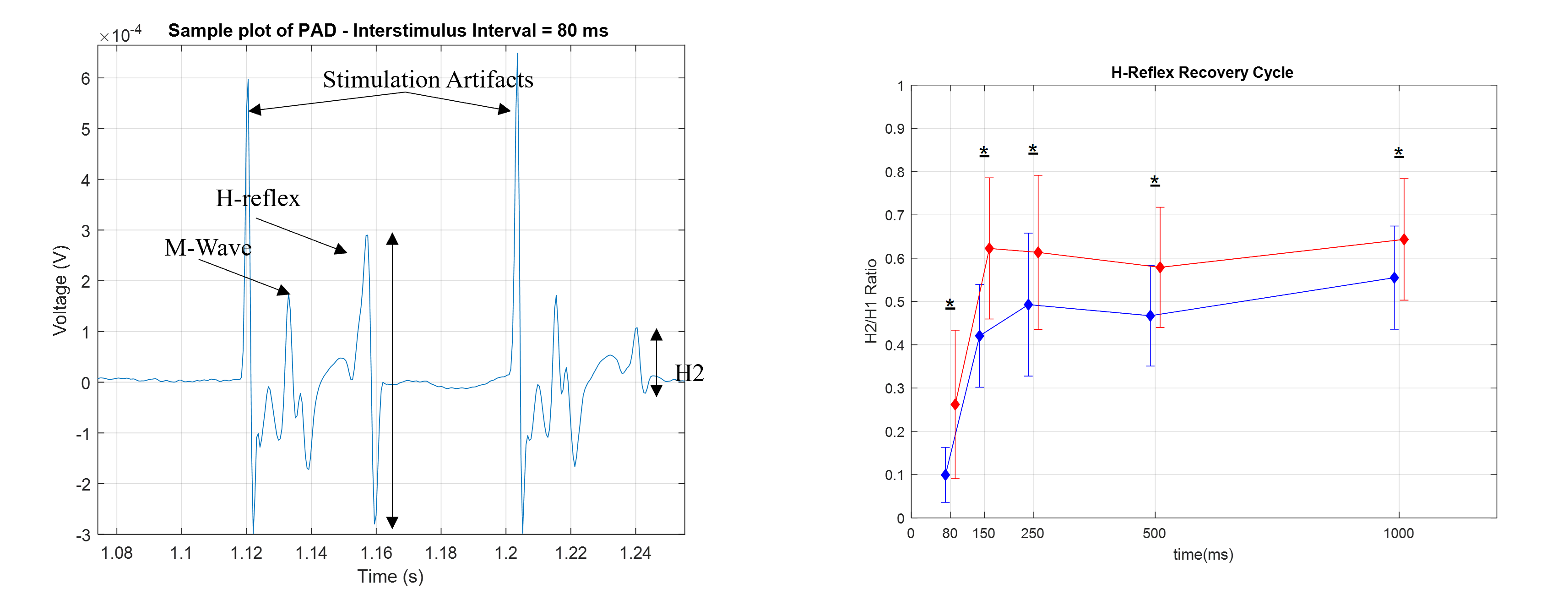
We measured H-Reflexs:
And post activation depression:
Motion Tracking with IMUs (Xsens)
TPAD